



ck6150 Tour électrique à commande numérique à 4 stations de haute précision
Fonctionnalités
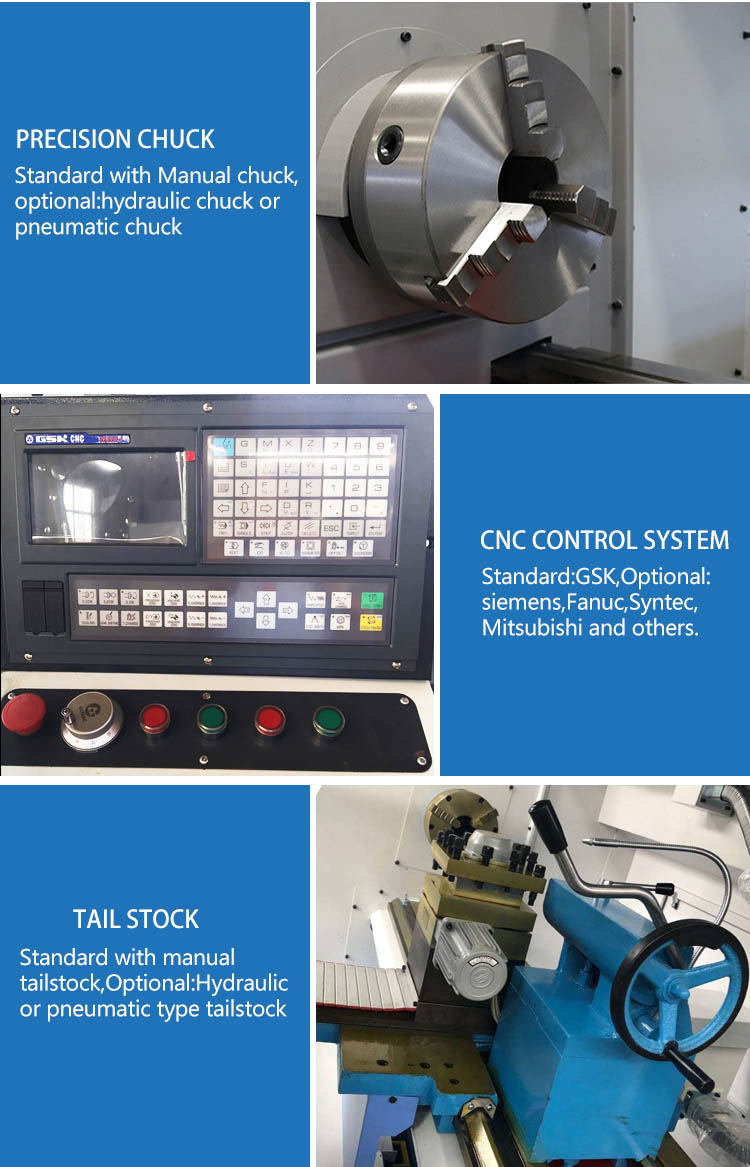
1. Structure de coulée intégrale du lit plat horizontal;
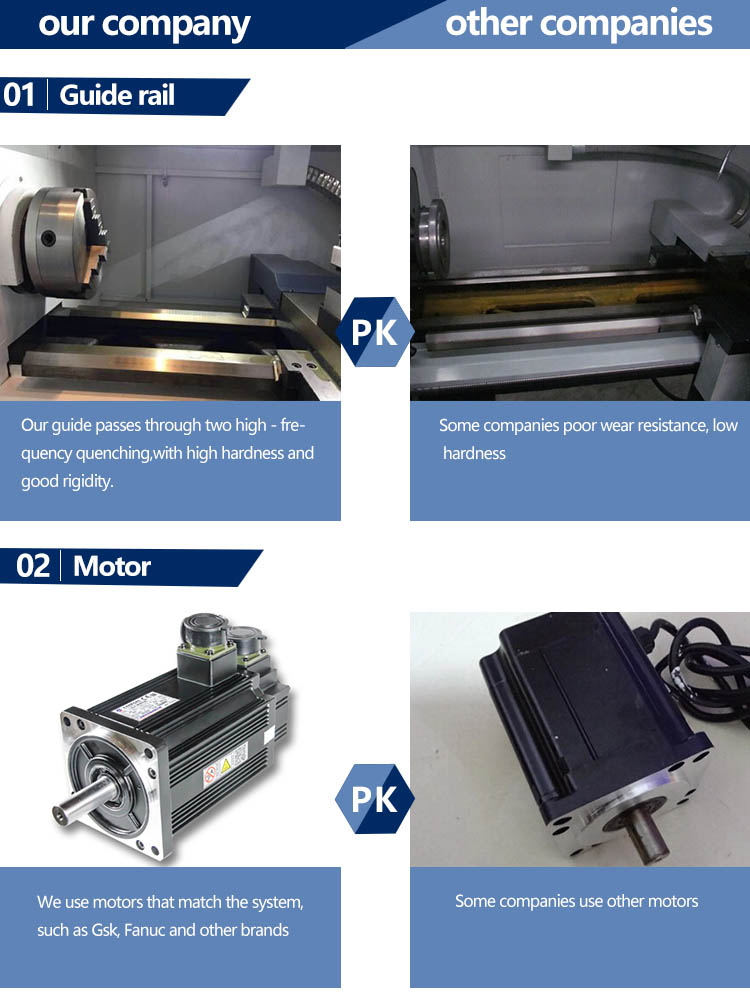
2. Trempe de fréquence ultra-audio du rail de guidage du lit ;
3. Le système d'alimentation adopte un servomoteur ;
4. Vis à billes de précision, structure de roulement composite de précision à haute rigidité;
5. La surface de joint de la vis à billes et du rail de guidage adopte une lubrification forcée automatique ;

| Article | CK6150A |
| Max.balançoire dia.au-dessus du lit | Φ500mm |
| Max.balançoire dia.sur glissière transversale | Φ280mm |
| Durée de traitement | 1500mm |
| Largeur du lit | 400mm |
| Dia.de broche | Φ82mm |
| Cône de broche | 1:20/Φ90 |
| nez de broche | Type de tête de broche D-8 |
| Vitesse de broche | 14-1500tr/min |
| Pas de vitesse de broche | pas à pas |
| taille du mandrin | 250mm |
| Porte-outil | 4 stations |
| Barre d'outils | 25X25mm |
| Puissance du moteur principal | 7.5KW |
| Précision de la position des axes X/Z | 0,02/0,025 mm |
| Répétabilité des axes X/Z | 0,01/0,012 mm |
| Déplacement axe X/Z | 360/750mm/1000mm/1500mm |
| Vitesse d'alimentation rapide de l'axe X/Z | 8/10 M/MIN |
| Course du manchon de poupée mobile | 150mm |
| Cône de poupée mobile | MT5 |
| Dimension | 3160*1560*1730mm |
| lester | 3500kg |

Application
La machine peut déplacer et traiter des pièces selon le programme programmé.Il intègre les dernières technologies telles que les machines, l'automatisation, les ordinateurs, la mesure et la microélectronique, et utilise une variété de capteurs, 2. Les capteurs utilisés sur les machines-outils à commande numérique comprennent principalement des encodeurs photoélectriques, des réseaux linéaires, qui sont principalement utilisés pour détecter la position, déplacement linéaire et angulaire, vitesse, pression, température, etc.
1. La machine-outil elle-même a une haute précision, une grande rigidité et une haute productivité.
2. La machine-outil a un haut degré d'automatisation, ce qui peut réduire l'intensité du travail;
Catégories de produits
-

ck6180 Machine horizontale en métal robuste cnc ...
-

SM325 prix usine cnc tour de type suisse machin ...
-

CK6140 Un tour cnc de machine électrique à 4 stations avec ...
-

TCK36 Chine usine prix métal cnc tournant sla ...
-

TCK630 Chine cnc oblique doublure de lit guide façon latte ...
-

Tour cnc de coupe au diamant AWR25 pour jantes en alliage ...





